|
William Nourse, Ph.D. I’m a computational neuroscientist & engineer focused on studying the neuronal basis of animal locomotion and complex behavior, and extracting principles for neuromorphic robotic control. I am a Postdoctoral Scholar at Case Western Reserve University in the Biologically Inspired Robotics Laboratory within the department of Mechanical and Aerospace Engineering. I am also the Project Manager for the C3NS: Communication, Coordination, and Control in Neuromechanical Systems program, funded by the NSF NeuroNex and BRAIN Initiative. I received my Ph.D. in Electrical Engineering from Case Western Reserve University in 2024, and was supervized by Roger Quinn. My focus was on developing open source tools for neuromechanical modeling and neurorobotic control. I was previously a visiting student researcher at the US Naval Research Laboratory (NRL) during the Summer and Fall of 2019 as part of the Robotics and Machine Learning Section within the Naval Center for Space Technology. When I'm not working, I enjoy watching classic movies, reading literature (and Stephen King), and spending time oustide with my wife and daughter. |

|
ResearchA selection of some highlights from my work. For a more complete listing, please consult my Google Scholar page. |
|
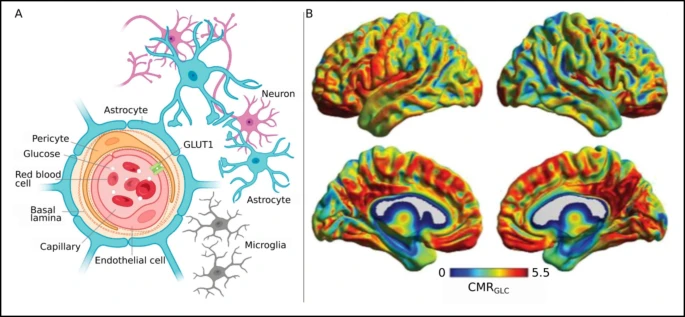
Brain-inspired energy efficient technologies for next-generation artificial intelligence
Hillel Chiel, Jay Coggan, Gourav Datta, Jean-Marc Fellous, William Nourse, Roger Quinn, Peter Thomas Biological Cybernetics, 2026 Since the advent of widely accessible AI tools, AI technology has been in high demand by businesses, academic researchers and individuals. Technology companies are building AI infrastructure at a rapid pace, and these facilities consume vast and growing resources, particularly electricity and water, with significant real and projected climate impacts. There is a need for new research initiatives to support long time horizon efforts to develop energy efficient computing capabilities to support the continued growth of AI infrastructure in a sustainable fashion. Such efficiency is required at both the hardware and software levels. Where can industry turn for examples of ultra-low power, energy efficient computing? We argue here that neurobiological principles offer rich and under-exploited sources of inspiration for energy efficient NeuroAI, and that new partnerships between industry and academia should be developed in this direction. |
|
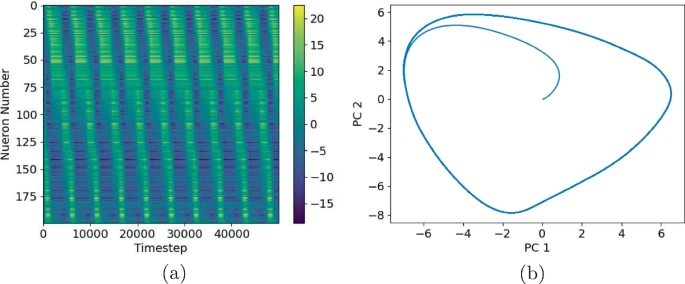
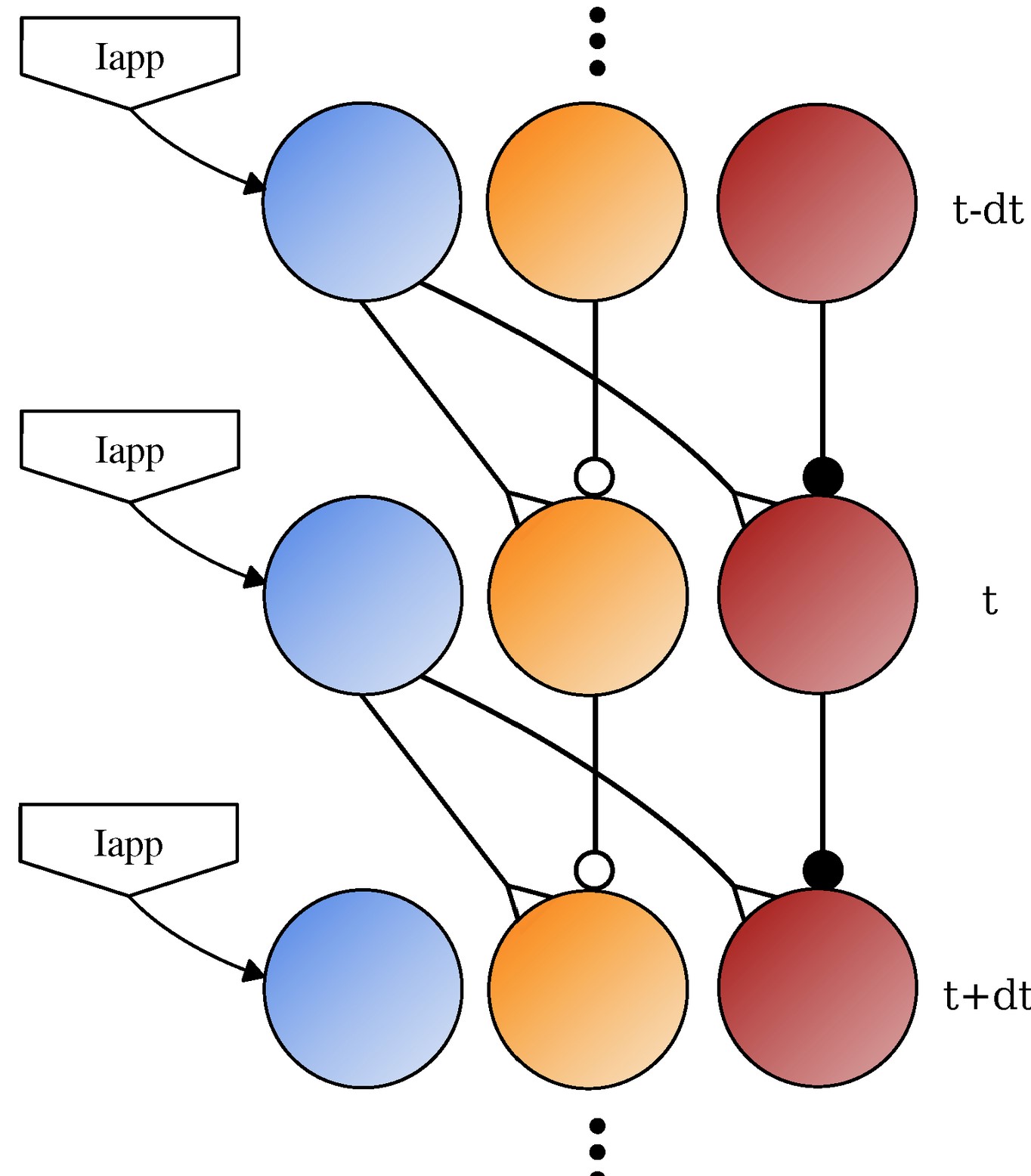
Sequence Generator Network for Neuromechanical Control of Rat Hindlimbs
Clayton Jackson, William Nourse, Roger Quinn Biomimetic and Biohybrid Systems, 2025 Mammalian locomotion is a complex behavior arising from interaction between neural and biomechanical systems, driven by rhythmic activity originating in the spinal cord. Although it has been extensively studied, the structure of the circuits that produce this behavior remains unknown. One approach to modeling the rhythmic activity is with half-center models, in which there are alternating periods of flexion and extension to coordinate muscle activity. While this approach is sufficient for simple antagonistic muscle pairs, it can be difficult to expand the controller for more complex models with muscle synergies. This work introduces a method of modeling the activity in the spinal cord with a population of neurons exhibiting a continuous cycle of activity, rather than the push-pull of half-centers. To evaluate the effectiveness of this neural model for locomotive behavior, we integrate it with a biomechanical simulation to control the muscle activity in a pair of rat hindlimbs. With this controller, a pair of simulated rat hindlimbs is able to walk on the ground with joint trajectories exhibiting similar features to the animal during locomotion. This model of the spinal cord activity shows promising results on a simple model and demonstrates the ability to be adapted to control more complex biomechanical models with muscle synergies. |
|
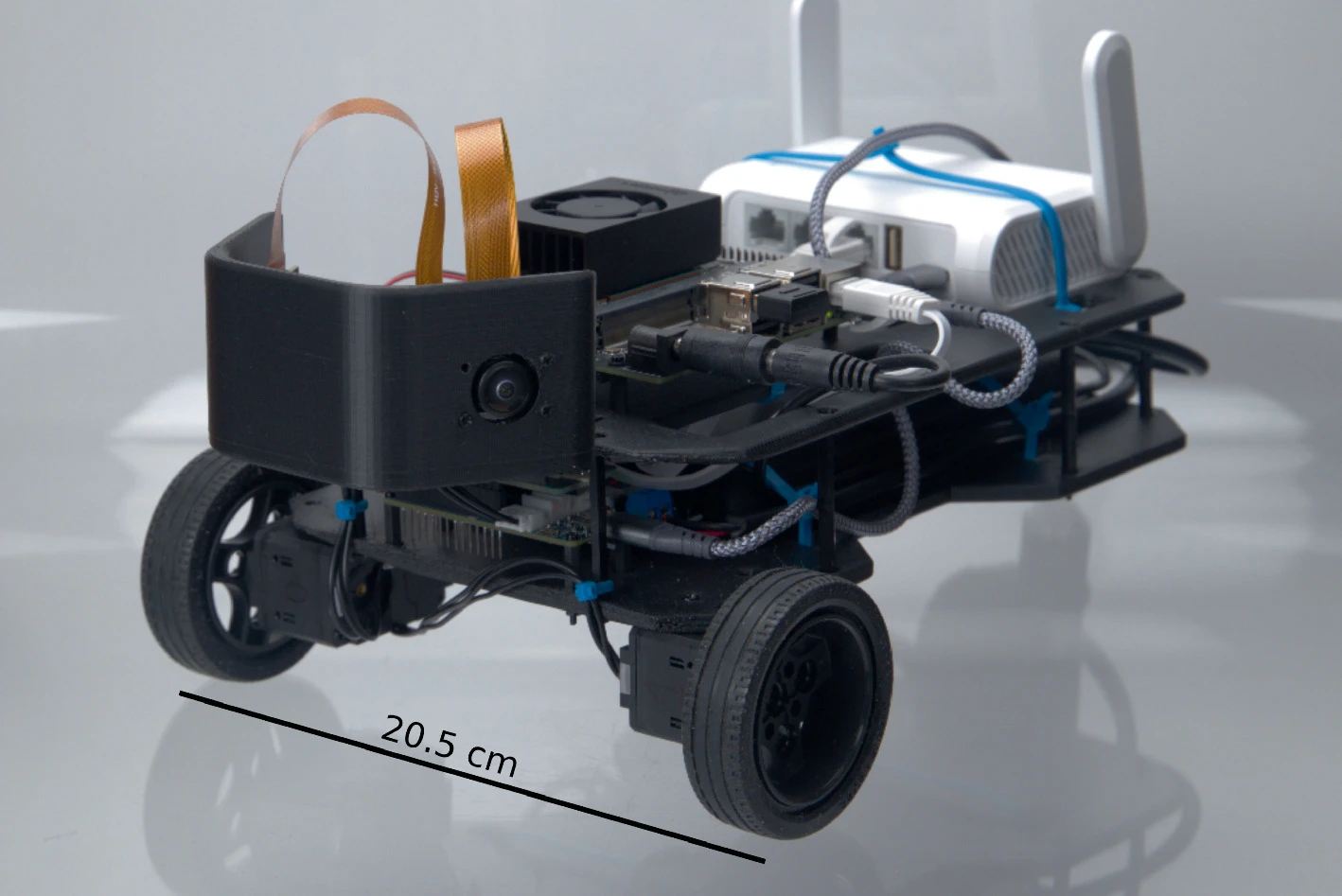
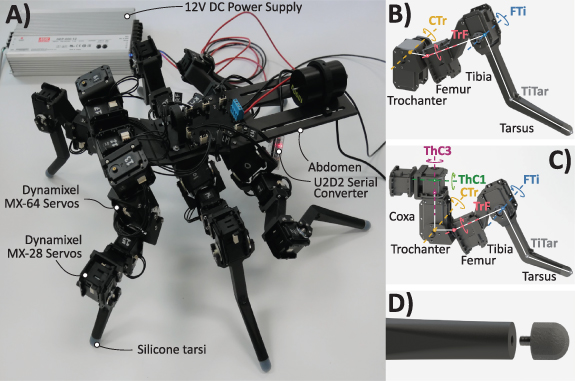
FlyWheel: A Robotic Platform for Modeling Fly Visual Behavior
William Nourse, Roger Quinn Biomimetic and Biohybrid Systems, 2025 An ongoing problem in robotics is the calculation of body motion given motion in the visual field, also known as ego-motion estimation. This is a problem which has been solved in the visual system of most animals, including the fruit fly Drosophila melanogaster. Here we present FlyWheel, an open-source robotic platform for studying models of the visual motion-processing system in insects. We showcase a dataset of rotational motion data in real-world conditions using the robot, and use a simplified model of the motion pathway in Drosophila as a baseline for further comparison and development. |
|
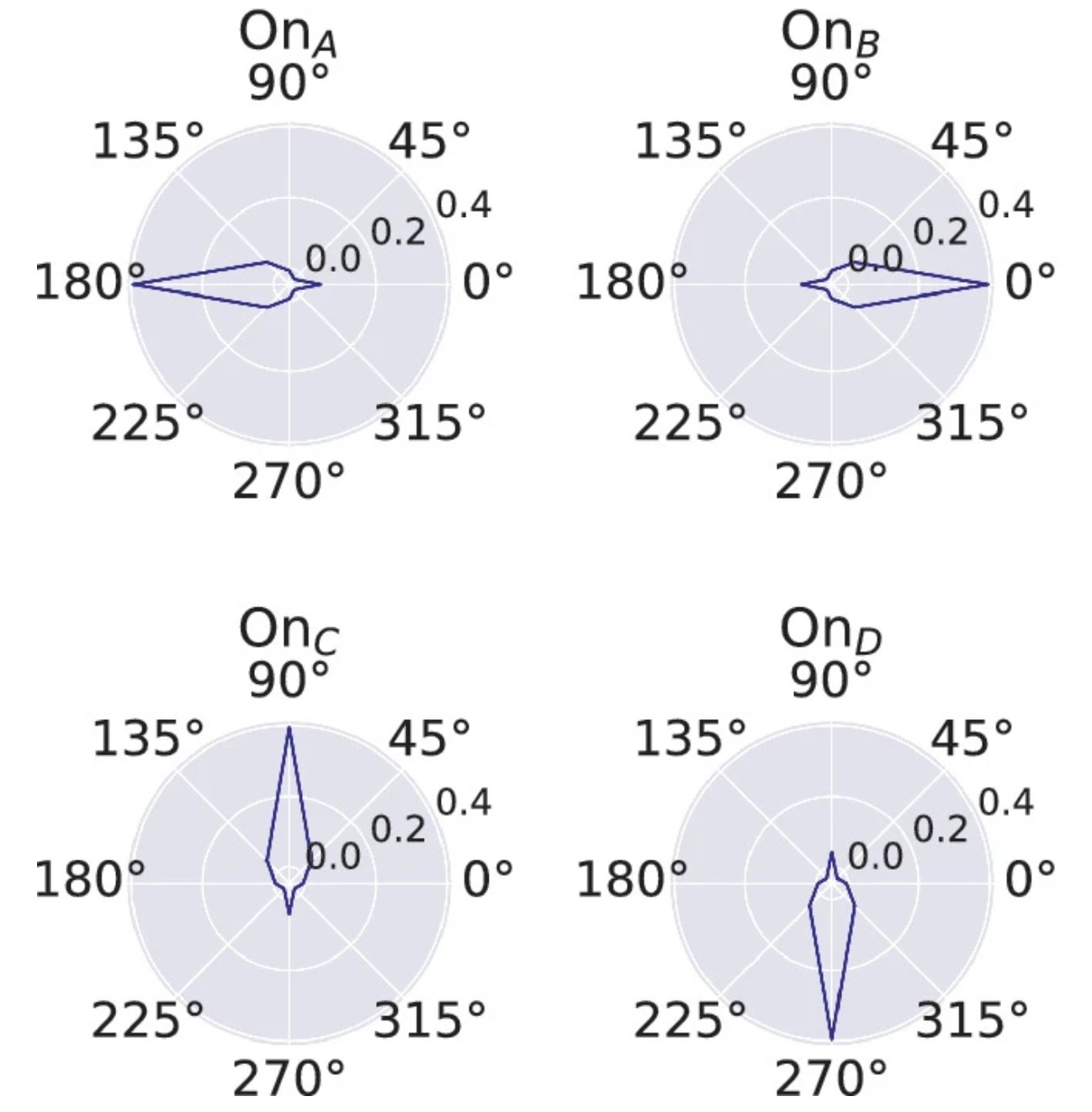
A Synthetic Nervous System for on and Off Motion Detection Inspired by the Drosophila melanogaster Optic Lobe
William Nourse, Nicholas Szczecinski, Roger Quinn Biomimetic and Biohybrid Systems, 2023 In this work, we design and simulate a synthetic nervous system which is capable of computing optic flow throughout a visual field, inspired by recent advances in the neural anatomy of Drosophila melanogaster found through connectomics. We present methods for tuning the network for desired stimuli, and benchmark its temporal properties and capability for directional selectivity. This network acts as a stepping point towards visual locomotion control in a hexapod robot inspired by the anatomy of Drosophila. |
|
SNS-Toolbox: An Open Source Tool for Designing Synthetic Nervous Systems and Interfacing Them with Cyber–Physical Systems
William Nourse, Clayton Jackson, Nicholas Szczecinski, Roger Quinn Biomimetics, 2023 We present our open-source Python package SNS-Toolbox, which is capable of simulating hundreds to thousands of spiking and non-spiking neurons in real-time or faster on consumer-grade computer hardware. We describe the neural and synaptic models supported by SNS-Toolbox, and provide performance on multiple software and hardware backends, including GPUs and embedded computing platforms. We also showcase two examples using the software, one for controlling a simulated limb with muscles in the physics simulator Mujoco, and another for a mobile robot using ROS. |
|
A perspective on the neuromorphic control of legged locomotion in past, present, and future insect-like robots
Nicholas Szczecinski, Clarus Goldsmith, William Nourse, Roger Quinn Neuromorphic Computing and Engineering, 2023 In the near future, we expect to see hexapod robots whose controllers include neuromorphic organization, computational units, and hardware. Such robots may exhibit the full mobility of their insect counterparts thanks to a 'biology-first' approach to controller design. This perspective article is not a comprehensive review of the neuroscientific literature but is meant to give those with engineering backgrounds a gentle introduction into the neuroscientific principles that underlie models and inspire neuromorphic robot controllers. |
Open-Source Software |
|
|
SNS-Toolbox
A Python package for the large-scale efficient simulation of Synthetic Nervous Systems (SNS), which is capable of simulating hundreds to thousands of spiking and non-spiking neurons in real-time or faster on consumer-grade computer hardware. |
Invited Talks |
|
Structure and Function in the Nervous System: Striking the Balance Between Bioinspiration and Biomimicry
WVU BioML Workshop, Morgantown, WV, 2025 When studying the nervous system, what biological details are important? Which ones aren't? How do we tell which is which? In this talk, I focused on this balance between bioinspiration and biomimicry. I gave some examples from the world of SNNs and robotics, and shared my own opinions. |
|
Towards Insect-Scale Intelligence for Robotics
NIH BRAIN NeuroAI Workshop, Bethesda, MD, 2024 With modern advances in control theory and AI, modern robots are capable of performing nearly any individual task, from climbing ladders to folding laundry. Looking ahead, how can we design systems which can not only perform a variety of tasks, but also decide which tasks to do using context-dependent decision-making? How can we do this using only onboard computation, without relying on the cloud? We currently have a connectome of all the neurons in the brain and ventral nerve cord of the fruit fly, and these animals are able to achieve a wide range of behaviors while autonomously switching between them based on both internal and external states. For these reasons, the insect nervous system is a prime template for creating autonomous machines. However, further work is needed before this will be possible. More connectomic information is needed, both in terms of detection resolution and across multiple individuals. Additionally, connectomes of insects with more sophisticated behavior such as mantises would help understand how these regions scale with intelligence. Moving beyond point-to-point graphs, dendritic and axonic structure may be necessary for some computations. Finally, more neuromorphic hardware is needed which can simulate millions of neurons while being easy to physically obtain. |
|
Original source code. Icon created by Siipkan Creative |